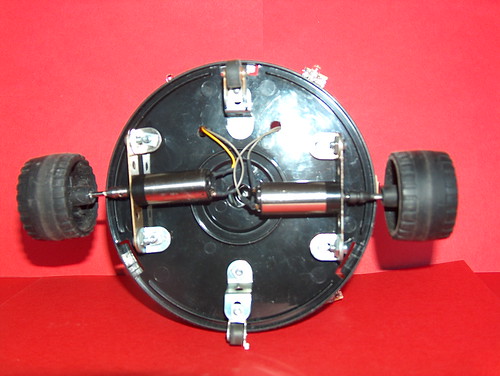
Figure 3: Caroll vu de dessous
Construire le robot
La mécanique
La figure
3 montre comment des pièces de Meccano permettent de fixer les roues. Les roues sont aussi des roues de Meccano. Les deux petites roues stabilisatrices sont des galets d'entraînement de bandes magnétiques récupérés dans des walkmans.
-
Les piles sont sur le plancher de la boîte.
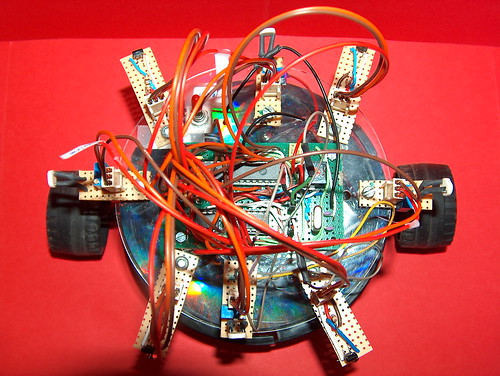
- La carte mère et les capteurs sont vissés sur le disque de protection en plexiglas que l'on trouve dans les boîtes de CD/DVD (attention à ne pas visser trop fort, le plastique n'est pas très solide !).
- Les capteurs sont connectés au micro-contôleur par des cables standards à trois fils.
- Les moteurs sont connectés sur les sorties de deux drivers de moteur TC4427A.
Les capteurs de lumière
Les capteurs de lumière, à base de photo-résistances montés en diviseurs de tension, fournissent une entrée analogique au micro-contrôleur.
Un capteur de lumière correspond au schéma de la figure
4. Le cablâge effectif, utilisant une résistance réglable de 22KOhm, est visible sur la figure
5. Les figures
6,
7 et
8 montrent le composant terminé, sous différents angles, afin de vous donner une idée de comment tout souder ensemble. La figure
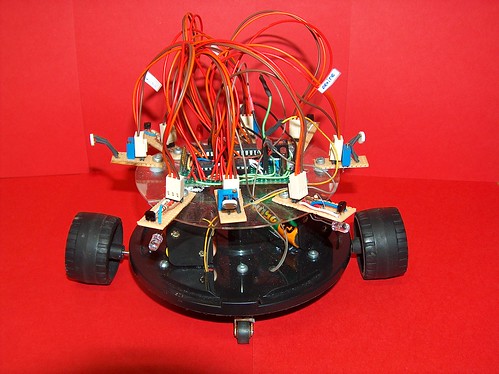
9 montre le circuit monté sur le robot.

Figure 4: Le schéma du capteur de lumière
|

Figure 5: Le cablâge du capteur de lumière
|
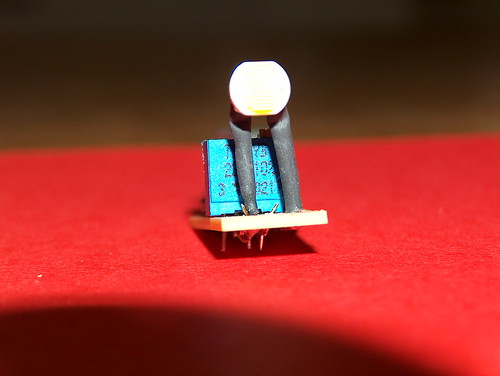
Figure 6: Le capteur de lumière vu de face
|
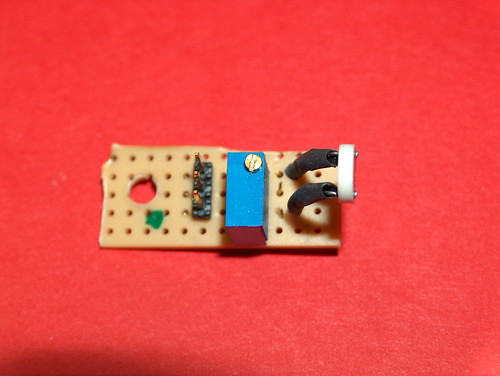
Figure 7: Le capteur de lumière vu de dessus
|
Figure 8: Le capteur de lumière vu de dessous
|
| |

Figure 9: Le capteur en position sur le robot
|
|
Capteurs de proximité
Ces capteurs sont construits autour d'un IS471F et d'une diode infra-rouge. Ils détectent des obstacles à une distance d'une dizaine de centimètres, selon la couleur de cet obstacle. La sortie est digitale (0 si obstacle, 1 sinon).
Les figures
10 et
11 montrent le module terminé. Les connecteurs sont identiques à ceux des capteurs de lumière : de haut en bas GND, +5V, micro-contrôleur.la figure
12 montre le capteur en place sur le robot.

Figure 10: Le capteur de proximité vu de dessus
|

Figure 11: Le capteur de proximité vu de dessous
|
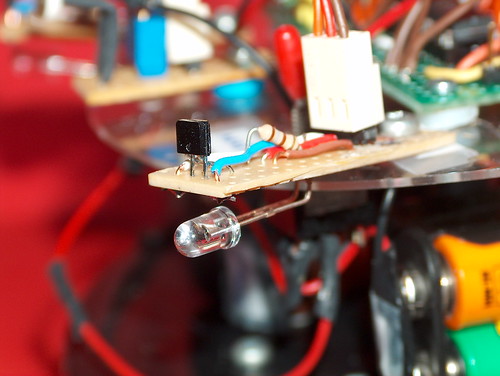
Figure 12: Le capteur de proximité en place sur le robot
|
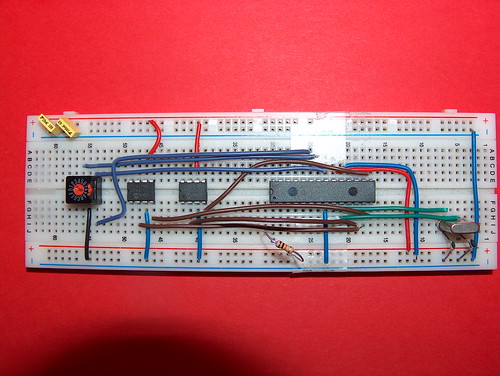
la carte mère
En l'absence de matériel permettant de concevoir des circuits imprimés, l'aspect final de la carte contenant le micro-contrôleur et les drivers des moteurs dépend fortement de vos talents en électronique, soudure et bricolage...
Afin qu'on y voit encore quelque chose, j'ai choisi de montrer non pas la carte finale, mais l'étape précédente, à savoir le montage sur une platine d'expérimentation. C'est ce qui est représenté sur la figure
13.
La roue codeuse permet de choisir, avant d'allumer le robot, quel sera son comportement : mouvement réflexe (se diriger vers la source de lumière la plus importante), ou apprentissage. Les valeurs utiles de cette roue et leur signification sont en commentaires à l'intérieur du
programme.
La figure
14 montre comment le micro-contrôleur est connecté au programmateur (ICD2).

Figure 14: Le cablâge vers le programmateur
Programmation
Le programme implémente deux comportements et des variantes :
-
Comportement réflexe : se diriger vers la source de lumière la plus intense.
- Apprendre à se déplacer pour récolter une récompense maximale.
Les deux comportements sont codés à l'intérieur d'un même programme. En fixant la valeur de la roue codeuse (avant d'allumer le robot), on choisit le programme qui sera exécuté.
Déplacement reflexe
On choisit ce comportement lorsque la roue codeuse vaut 4. Le programme se contente de lire les capteurs de lumières, de les ordonner dans le sens des intensités de lumière décroissantes, et de choisir le mouvement correspondant à se mouvoir dans la direction d'où provient le plus de lumière.
Une petite modification du programme permettrait de tenir compte des obstacles...
Apprendre
L'algorithme implémenté est un Q-Learning simple :
-
Chaque fois que le robot reçoit plus de lumière au total qu'au temps précédent, il reçoit une récompense.
- Cette récompense est augmentée si le mouvement choisi est en ligne droite (marche avant ou marche arrière, mais pas tourner).
- Le programme mémorise et estime la récompense qu'il recevra selon son choix de mouvement.
- Il choisit (souvent) l'action qui maximise cette espérance de gain.
Pour plus d'informations sur l'apprentissage par renforcement, consultez
le livre de Sutton et Barto, et plus particulièrement
la description de l'algorithme.
Le source du programme est
ici.
Ceci est
le script de l'éditeur de liens.
Vous pouvez aussi directement utiliser
le fichier hex.
Si vous utilisez le fichier hex directement avec un autre programmateur que le MPLAB ICD2, faites-le moi savoir !
Quelques commentaires sur le programme
Un état du système, tel qu'il est perçu par le robot pourrait être décrit par :
-
L'ordre des capteurs de lumière (en fonction de l'intensité lumineuse que chacun d'eux a reçue).
- L'état des capteurs de proximité.
Il y a 24 ordres possibles pour les quatre capteurs de lumière, et 16 configurations possibles pour les capteurs de proximité. Celà donne 24 × 16= 384 états différents. Comme il y a 4 actions différentes, celà conduit à considérer 1536 couples (état,action). Comme on a besoin, dans les versions
basiques du l'apprentissage par renforcement, de stocker les valeurs de ces 1536 couples, il nous faudrait 1536 × 4= 6144 octets pour mémoriser ces nombres réels. C'est supérieur à la capacité de la mémoire de données du micro-contrôleur, et bien au-dessus de ce que l'on peut stocker dans l'EEPROM.
Si l'on ne peut pas stocker dans l'EEPROM ce que le robot a appris, il nous est impossible d'essayer de comprendre ce qu'il appris, et aussi de reprendre l'apprentissage à l'endroit où il l'avait laissé à l'épisode précédent.
A cause de ce problème de place mémoire, nous avons simplifié la description d'un état :
-
On garde l'ordre sur les capteurs de lumière.
- On ne conserve que deux booléens qui indiqueront s'il y a un obstacle devant et/ou un obstacle derrière.
On se ramène donc à un total de 96 états, soit 384 couples (état,action). Mais l'espace occupé par 384 flottants est de 1586 octets.
C'est convenable pour ce qui concerne la mémoire de données, mais c'est encore trop pour l'EEPROM !
On décide alors de ne stocker que des approximations des
Q(
s,
a) dans l'EEPROM : comme ces valeurs sont toujours comprises entre 0 et 10 (celà est dû aux valeurs des récompenses élémentaires et à la valeur de gamma), on multiplie
Q(
s,
a) par 6553.5, on en garde la partie entière, et on stocke l'entier obtenu (sur deux bits) dans l'EEPROM. Le procédé inverse permet de reconstruire un flottant.
On n'occupe plus alors que 768 octets de l'EEPROM, ce qui nous laisse même de la place pour éventuellement stocker d'autres informations sur le déroulement de l'apprentissage (valeur de alpha, valeur de epsilon ...).
Conclusions
Il reste encore quelques réglages à effectuer pour améliorer la qualité de l'apprentissage : valeur et décroissance de alpha, valeur et décroissance de epsilon,valeur de gamma...
Il reste beaucoup de place dans la mémoire de programme (le programme dont on parle ici n'en occupe que 10% !). On peut sérieusement envisager l'implantation de programmes non triviaux : réseaux de neurones, algorithmes génétiques...
Contactez-moi pour plus d'infos, détection de bugs ...: francesco.De-comite@univ-lille1.fr
This document was translated from LATEX by
HEVEA.